Содержание
Ошибки и ремонт частотных преобразователей EKF в Новокуйбышевске
Новокуйбышевск
|
|
Ремонт частотных преобразователей EKF
Ремонт частотного преобразователя EKF, впрочем, как и ремонт частотников других производителей имеет ряд особенностей в силу своего конструктива. Частотные преобразователи, точнее их начинка делятся на две части:
- Аппаратная часть,
- Программная часть.
Частотники данного производителя не являются исключением из правил, именно поэтому ремонт частотного преобразователя EKF имеет точно такой же ряд особенностей, как и у других преобразователей.
Диагностировать ту или иную неисправность помогают коды ошибок частотного преобразователя, которые отображаются на небольшом дисплее, расположенном на лицевой панели привода. Коды ошибок частотного преобразователя EKF в зависимости от серии описаны в инструкции, пользователя которые можно скачать с нашего сайта.
Ремонт частотных преобразователей EKF в Новокуйбышевске, как и любых других преобразователей, выпущенных под другими брендами, всегда начинается с аппаратной части, после успешного ремонта аппаратной части наступает очередь программной.
Настройка частотного преобразователя EKF также прописана в инструкции завода производителя, для каждой серии частотных преобразователей настройка будет индивидуальной, так как каждая линейка преобразователей решает свои собственные задачи, этим обусловливается широкая номенклатура данного промышленного оборудования.
Ремонт частотных преобразователей EKF в сервисном центре
Компания «Кернел» производитремонт частотных преобразователей EKF в Новокуйбышевске с 2002 года. За время существования компании наши сотрудники накопили колоссальный опыт в ремонте преобразователей частоты такого известного производителя как EKF. Ремонт подобного промышленного оборудования ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
За время существования компании наши сотрудники накопили колоссальный опыт в ремонте преобразователей частоты такого известного производителя как EKF. Ремонт подобного промышленного оборудования ответственное и сложное занятие, требующие максимальной отдачи, профессионализма и максимально полной материальной базе.
Специалисты нашего сервисного центра максимальное внимание уделяют качеству исполнения ремонта, программирования и настройке промышленных преобразователей частоты, не зависимо от производителя данного промышленного оборудования. Именно поэтому мы смело даем гарантию на все выполненные работы шесть месяцев.
Ремонт частотных преобразователей EKF в Новокуйбышевске производится исключительно с использованием оригинальных запасных частей, на компонентном уровне с применением высокотехнологичного диагностического оборудования, квалифицированным персоналом с инженерным образованием.
В случае выхода из строя преобразователя частоты на вашем производстве либо появились проблемы с приводом, которые вы не можете решить самостоятельно, мы всегда рады вам помочь. Специалисты нашего сервисного центра в минимальные сроки проведут глубокую диагностику с последующим ремонтом частотного преобразователя EKF.
Специалисты нашего сервисного центра в минимальные сроки проведут глубокую диагностику с последующим ремонтом частотного преобразователя EKF.
Инженеры сервисного центра выполняют качественный ремонт частотных преобразователей EKF всех серий, когда-либо выпускаемых компанией.
| Серия ПЧ | Типы частотных преобразователей EKF |
|---|---|
| EKF VECTOR-75 Basic | VT75-0R7-3B; VT75-1R5-3B; VT75-2R2-3B; VT75-4R0-3B; VT75-5R5-3B; VT75-7R5-3B |
| EKF VECTOR-75 compact | VT75с-0R4-1; VT75с-0R7-1; VT75с-1R5-1; VT75с-0R7-3; VT75с-1R5-3; VT75с-2R2-3 |
| EKF VECTOR-PROxima | VT100-0R4-1; VT100-0R4-1B; VT100-0R7-1; VT100-0R7-1B; VT100-1R5-1; VT100-1R5-1B; VT100-2R2-1B; VT100-0R7-3; VT100-0R7-3B; VT100-1R5-3; VT100-1R5-3B; VT100-2R2-3B; VT100-4R0-3B; VT100-5R5-3B; VT100-7R5-3B; VT100-011-3B; VT100-015-3B; VT100-018-3; VT100-022-3; VT100-030-3; VT100-037-3; VT100-045-3; VT100-055-3; VT100-075-3; VT100-090-3; VT100-110-3; VT100-132-3; VT100-160-3; VT100-185-3; VT100-200-3; VT100-220-3; VT100-250-3; VT100-280-3; VT100-315-3; VT100-355-3; VT100-400-3 |
В данной таблице присутствуют далеко не все частотные преобразователи EKF ремонт которых предлагает наш сервисный центр.
Ошибки частотного преобразователя EKF
В процессе работы выходит из строя даже самое надежное промышленное оборудование. Частотники в наше время, нашли широкое применение абсолютно во всех сферах промышленности, управляя как мини моторами в оргтехнике, так и гигантскими двигателями в горнодобывающей промышленности.
Для простоты общения со столь сложной электроникой все частотные преобразователи оснащены небольшими дисплеями с помощью которых выводятся информационные сообщения с кодами ошибок, расшифровав которые можно сразу же узнать причину ее возникновения. Если учесть распространенность данной промышленной электроники, то появляется острая нужда в расшифровке кодов ошибок частотных преобразователей. В этой статье мы рассмотрим одного из самых известных производителей промышленной электроники имеющему уважение во всем мире, EKF и серию сервоприводов VECTOR-PROxima.
Существует несколько видов ошибок, некоторые из них можно устранить автоматически, а некоторые возможно исправить только, обратившись в специализированный сервисный центр.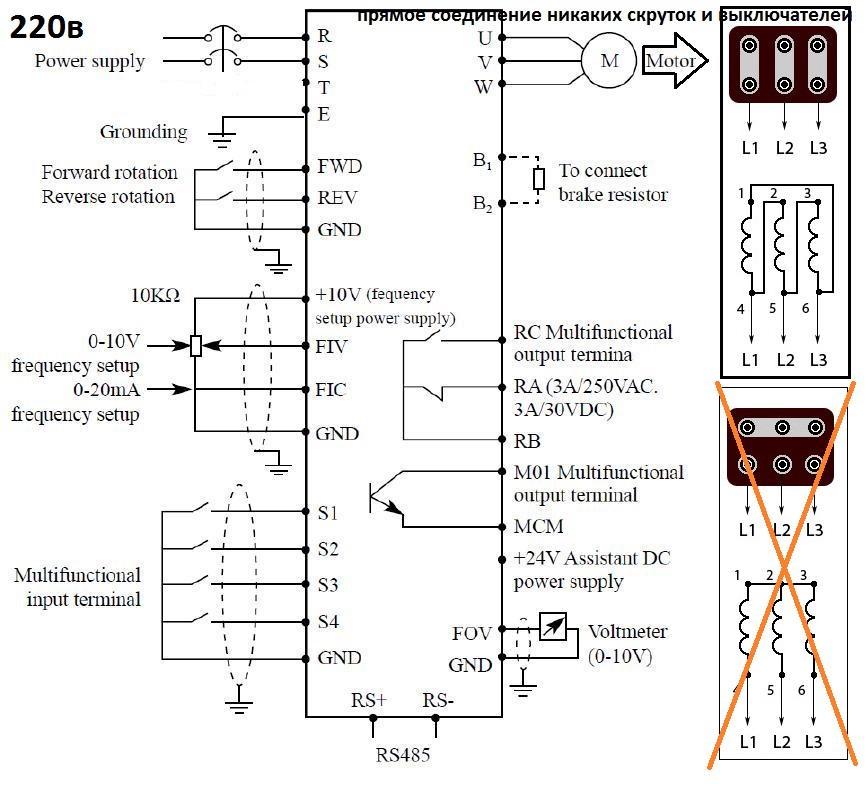 В руководстве пользователя прописаны все коды ошибок частотного преобразователя EKF и их расшифровка.
В руководстве пользователя прописаны все коды ошибок частотного преобразователя EKF и их расшифровка.
Коды ошибок частотного преобразователя EKF EKF VECTOR-PROxima
| Код ошибки | Ошибка |
|---|---|
| 0000 | Нет ошибки. |
| 0001 | Резерв. |
| 0002 | Перегрузка по току при ускорении. |
| 0003 | Перегрузка по току при замедлении. |
| 0004 | Перегрузка по току при постоянной скорости. |
| 0005 | Перенапряжение при ускорении. |
| 0006 | Перенапряжение при замедлении. |
| 0007 | Перенапряжение при постоянной скорости. |
| 0008 | Перегрузка буферного регистра. |
| 0009 | Недостаточное напряжение. |
| 000A | Перегрузка преобразователя.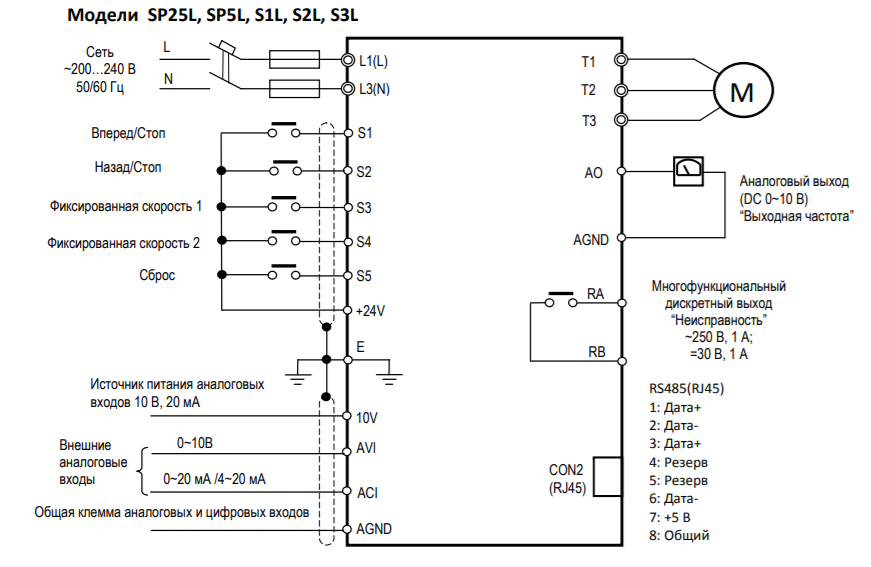 |
| 000B | Перегрузка двигателя. |
| 000C | Резерв. |
| 000D | Обрыв фазы на выходе. |
| 000E | Перегрев модуля. |
| 000F | Внешняя неисправность. |
| 0010 | Ошибка связи. |
| 0011 | Ошибка контактора. |
| 0012 | Ошибка проверки тока. |
| 0013 | Ошибка автонастройки двигателя. |
| 0014 | Резерв. |
| 0015 | Ошибка чтения/записи параметров. |
| 0016 | Неисправность компонентов преобразователя. |
| 0017 | Короткое замыкание двигателя. |
| 0018 | Резерв. |
| 0019 | Резерв. |
| 001A | Достижение времени работы. |
| 001B | Пользовательская ошибка 1. |
| 001C | Пользовательская ошибка 2. |
| 001D | Достижение времени включенного. |
| 001E | Без нагрузки. |
| 001F | Потеря обратной связи PID при работе. |
| 0028 | Выход за лимит времени быстрого ограничения тока. |
| 0029 | Переключение двигателя при работе. |
| 002A | Чрезмерное отклонение скорости. |
| 002B | Завышенная скорость двигателя. |
Документация
|
Руководство по эксплуатации преобразователя частоты EKF VECT0R-PROxima
| Скачать PDF |
|
Руководство по эксплуатации преобразователей частоты EKF VECTOR-75
| Скачать PDF |
Схемы подключения частотных преобразователей EKF
| Схема подключения преобразователей частоты VECTOR-75 Basic | Схема подключения преобразователей частоты VECTOR-75 compact |
|
|
|
| Схема подключения преобразователей частоты VECTOR100 PROxima от 0,4 до 2,2 кВт | 04-Схема подключения преобразователей частоты VECTOR100 PROxima от 4 до 7,5 кВт |
|
|
|
| Схема подключения преобразователей частоты VECTOR100 PROxima от 11 кВт | |
|
| |
Для максимально долгой и безаворийной работы частотных преобразователей важно неукоснительно соблюдать все, что прописано в документации.
Обязательно должны соблюдаться все рекомендации, изложенные в инструкции по монтажу и эксплуатации, в особенности требования по технике безопасности!
Преобразователь частоты разработан таким образом, что он пытается избежать аварийных отключений путем ограничения момента, перенапряжения и т.п.
Появление сбоев при вводе в эксплуатацию или вскоре после него обычно свидетельствует о неверной настройке или неправильном подключении.
Возникновение неисправностей или проблем после длительного режима бесперебойной работы обычно происходит по причине изменений в системе или ее окружении (например, в результате износа).
Дополнительную информацию по частотным преобразователям EKF можно посмотреть и скачать на офсайте.
Настройка частотного преобразователя EKF, программирование
Настройка частотных преобразователей EKF (программирование) происходит в рамках установленных производителем правил, существует общий алгоритм по программированию (настройке частотных преобразователей), относящийся ко всем производителям данного промышленного оборудования. Ниже представлена пошаговая инструкция по настройке частотных преобразователей EKF.
Ниже представлена пошаговая инструкция по настройке частотных преобразователей EKF.
- Выбор режима управления приводом EKF (управление по показанию датчиков, дистанционное управление, дистанционное управление).
- В случае использования отдельного (выносного) монитора, настраивается вывод на него технической информации.
- Далее определяем конфигурацию подключения серводвигателя. На данной стадии задаются такие параметры как- возможность применения обратной связи либо без ее применения, а в память блока заносятся данные по: величине крутящего момента, мощности потребителей, номинальное значения частоты, напряжение, ток и скорости вращения ротора.
- Программируется минимально допустимая величина напряжения и частоты, а также время ускорения ротора от ноля до номинального значения.
- И в завершении, в программу управления частотным преобразователем EKF вносятся функциональные данные со значениями отдельных клемм и особенностями сигналов.
 Отмечаются действия оборудования, выполняющиеся автоматически при отсутствии информации поступающей в оперативном режиме с датчика.
Отмечаются действия оборудования, выполняющиеся автоматически при отсутствии информации поступающей в оперативном режиме с датчика.
 Отмечаются действия оборудования, выполняющиеся автоматически при отсутствии информации поступающей в оперативном режиме с датчика.
Отмечаются действия оборудования, выполняющиеся автоматически при отсутствии информации поступающей в оперативном режиме с датчика.
В некоторых частотниках существует пункт наличия/отсутствия фильтра в цепи питания двигателя. Этот пункт отвечает за подключение различных видов нагрузок, в том случае, когда возможно выбрать нормальное или инверсное изменение частоты при повышении уровня сигнала обратной связи.
Все настройки частотных преобразователей EKF приведены в технической документации к частотному преобразователю который можно скачать на свой компьютер, распечатать или просто открыть на официальном сайте EKF.
Оставить заявку на ремонт частотных преобразователей EKF
У вас вышел из строя частотник? Вам необходим срочный ремонт частотных преобразователей EKF в Новокуйбышевске? Оставьте заявку на ремонт нажав на одноименную кнопку в верхней правой части экрана либо свяжитесь с нашими менеджерами. Связаться с ними можно несколькими способами:
- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Позвонив по номеру телефона:
- +7(8482) 79-78-54;
- +7(8482) 55-96-39;
- +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail. ru
 ru
ruДалеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
|
-
Другие услуги по ремонту промышленной эелектроники и оборудования-
Ремонт частотных преобразователей в Новокуйбышевске -
Промышленный привод, ремонт в Новокуйбышевске -
Ремонт частотных преобразователей Веспер в Новокуйбышевске -
Ремонт частотного преобразователя Danfoss в Новокуйбышевске -
Ремонт частотного преобразователя Lenze в Новокуйбышевске -
Ремонт частотных преобразователей ABB в Новокуйбышевске -
Ремонт частотных преобразователей Siemens в Новокуйбышевске -
Ремонт частотного преобразователя INVT в Новокуйбышевске -
Ремонт частотного преобразователя Schneider Altivar в Новокуйбышевске -
Частотный преобразователь frenic, ремонт частотников FUJI в Новокуйбышевске -
Ремонт частотного преобразователя Delta в Новокуйбышевске -
Частотный преобразователь VACON, ремонт частотника в Новокуйбышевске -
Ремонт частотных преобразователей KEB в Новокуйбышевске -
Ремонт частотного преобразователя Omron в Новокуйбышевске -
Частотный преобразователь Mitsubishi Electric, ремонт привода в Новокуйбышевске -
Ремонт частотников Emerson — Control techniques, Unidrive — Commander в Новокуйбышевске -
Ремонт частотного преобразователя Yaskawa в Новокуйбышевске -
Allen Bradley преобразователи частоты, ремонт Allen Bradley в Новокуйбышевске -
Ремонт частотника Baumuller в Новокуйбышевске -
Преобразователи частоты Bosch Rexroth, ремонт Bosch Rexroth в Новокуйбышевске -
Ремонт Rexroth Indramat в Новокуйбышевске -
Fanuc, ремонт привода в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Emotron в Новокуйбышевске -
Ремонт частотного преобразователя KONE в Новокуйбышевске, ошибки -
Ошибки и ремонт частотного преобразователя STOBER POSIDRIVE в Новокуйбышевске -
Ошибки и ремонт частотного преобразователя ESQ в Новокуйбышевске -
Ошибки и ремонт частотного преобразователя INNOVERT в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей BONFIGLIOLI в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей WILO в Новокуйбышевске -
Ремонт частотных преобразователей SIRIO и NETTUNO в Новокуйбышевске, ошибки -
Ошибки и ремонт частотных преобразователей HYUNDAI в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей IDS-DRIVE в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей LG LS в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей HYDROVAR в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей SEW-EURODRIVE в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей ОВЕН в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей HITACHI в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей TOSHIBA в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей IEK в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей PROSTAR в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей GEFRAN в Новокуйбышевске -
Ошибки и ремонт частотного преобразователя OTIS в Новокуйбышевске -
Ошибки и ремонт частотного преобразователя SANTERNO в Новокуйбышевске -
Ремонт и программирование частотных преобразователей ARKEL A-DRIVE в Новокуйбышевске -
Ремонт и программирование частотных преобразователей SIEI ARTDrive в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Schindler Biodyn в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Sigma LG в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей THYSSEN в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Macpuarsa в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Canny в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей ERMAN в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей EKF в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей INOVANCE в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей KUKA в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей DEMAG в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей CHIRON в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей EuraDrives в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Parker в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей NIDEC в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей NORD в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Panasonic в Новокуйбышевске -
Ошибки и ремонт частотных преобразователей Eurotherm в Новокуйбышевске -
Все услуги по ремонту промышленной электроники и оборудования
-
Сервисный центр ООО «КЕРНЕЛ»
Преобразователи частоты EKF — Преобразователи частоты EKF
Перейти к контенту
Осуществляем подбор оборудования под требования заказчиков
ВСЕГДА НА СВЯЗИ
Ежедневно на
связи 24 часа
ЛУЧШИЕ ЦЕНЫ
Оптимальные цены и условия поставки
ГАРАНТИЯ КАЧЕСТВА
Качество продукции подтверждено сертификатами
СРОК ПОСТАВКИ
Кратчайшие сроки на всех
этапах: от заказа до
производства и поставки
СПЕЦИАЛИСТЫ
Проконсультируем по
техническим и
коммерческим вопросам
НАПРАВИТЬ ЗАПРОС
Для запроса цен на ПЧ
просто позвоните или
напишите на почту
Серии преобразователей частоты EKF
VT100 PROxima
1ф, 200. ..240 В, 0,4…2,2 кВт
..240 В, 0,4…2,2 кВт
3ф, 380…480 В, 0,75…400 кВт
VT75 Basic
3ф, 380…480 В, 0,75…7,5 кВт
VT75 compact
1ф, 220…240 В, 0,75…2,2 кВт
3ф, 380…480 В, 0,75…7,5 кВт
Ключевые характеристики частотных преобразователей EKF
VT100 PROxima
Общепромышленные преобразователи частоты VT EKF PROxima применяются в системах автоматизации вентиляции, насосного оборудования, в системах электроприводов конвейеров, лифтов и т.д.
Технические характеристики:
Номинальная мощность двигателя — 0,4 — 400 кВт
Количество фаз на входе: 1 — 1 фаза 230 В, 3 — 3 фазы 3 х 380 В
Особенности:
- точное поддержание скорости вращения двигателя в зависимости от внешних факторов
- снижение потребления электроэнергии на 30 и более процентов
- плавный пуск электродвигателя;
- регулирование частоты вращения электродвигаталя;
- защита электродвигателя от прегрузок;
- уменьшение пусковых токов;
- преобразование однофазной сети в трехфазную (однофазные преобразователи).

VT75 Basic
Преобразователь частоты VT75 EKF Basic предназначен для управления скоростью вращения электродвигателей, применяемых в широком спектре промышленного оборудования.
Технические характеристики:
Номинальная мощность двигателя — 0,75 — 7,5 кВт
Количество фаз на входе: 3 — 3 фазы 3 х 400 В
Особенности:
VT75 compact
Компактный преобразователь частоты VT75 compact EKF предназначен для управления скоростью вращения электродвигателей, применяемых в широком спектре промышленного оборудования.
Технические характеристики:
Номинальная мощность двигателя — 0,75 — 7,5 кВт
Количество фаз на входе: 1 — 1 фаза 230 В, 3 — 3 фазы 3 х 400 В
Особенности:
Наши партнёры — рекомендуем для поиска и выбора оборудования!
Расширенный фильтр Калмана (EKF) — документация коптера
Алгоритм расширенного фильтра Калмана (EKF) используется для
оценить положение транспортного средства, скорость и угловую ориентацию на основе
гироскопы скорости, акселерометр, компас, GPS, воздушная скорость и барометрический
измерения давления.
Преимущество EKF перед более простым дополнительным фильтром
алгоритмов (например, «Инерциальная навигация»), заключается в том, что, объединяя все доступные измерения, лучше
способный отбрасывать измерения со значительными ошибками. Это делает
транспортное средство менее подвержено неисправностям, затрагивающим один датчик. EKF также
позволяет выполнять измерения с помощью дополнительных датчиков, таких как датчик оптического потока и
лазерные дальномеры, которые будут использоваться для помощи в навигации.
Текущие стабильные версии ArduPilot используют EKF3 в качестве основного источника оценки ориентации и положения, а DCM тихо работает в фоновом режиме.
Если автопилот имеет два (или более) доступных IMU, два «ядра» EKF (т. е. два экземпляра EKF) будут работать параллельно, каждый из которых использует свой IMU.
В любой момент времени используется только вывод одного ядра EKF, причем это ядро сообщает о наилучшем состоянии, которое определяется согласованностью данных его датчиков.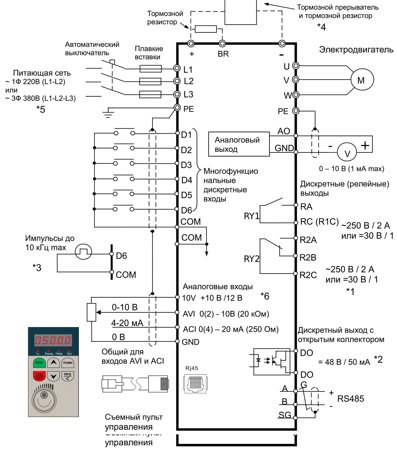
Большинству пользователей не требуется изменять какие-либо параметры EKF, но приведенная ниже информация содержит некоторую информацию о наиболее часто изменяемых параметрах.
Более подробную информацию можно найти на вики-странице разработчика EKF.
Следует ли использовать EKF2 или EKF3?
В общем, мы рекомендуем пользователям использовать EKF3, который теперь используется по умолчанию. Кроме того, у автопилотов 1 МБ есть только эта опция из-за нехватки места. EKF2 все еще можно использовать, но он не имеет многих улучшений EKF3, таких как новые источники датчиков, включая маяки, кодировщики колес и визуальную одометрию.
Выбор EKF и количества ядер
AHRS_EKF_USE: установите «1», чтобы использовать EKF, «0», чтобы использовать DCM для управления ориентацией и
инерциальная навигация (вертолет-3.2.1) или счисление пути (самолет) для контроля положения. В Коптере-3.3 (и выше) этот параметр принудительно установлен в «1» и не может быть изменен.
AHRS_EKF_TYPE: установите значение «2», чтобы использовать EKF2 для оценки отношения и положения, «3» для EKF3.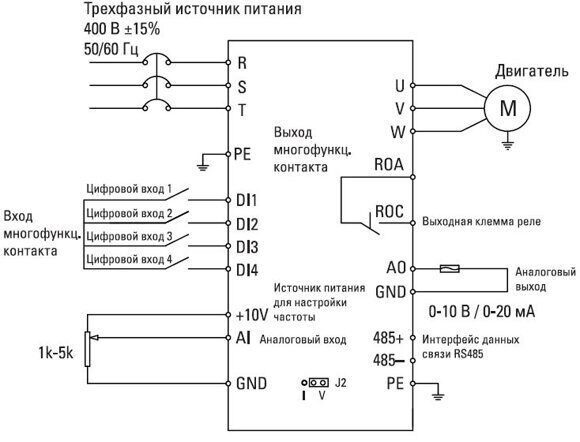
EK2_ENABLE, EK3_ENABLE: установите значение «1», чтобы включить EKF2 и/или EKF3 соответственно.
EK2_IMU_MASK, EK3_IMU_MASK: битовая маска, указывающая, какие IMU (например, акселерометр/гироскоп) использовать. «Ядро» EKF (то есть один экземпляр EKF) будет запущено для каждого указанного IMU.
1: запуск одного ядра EKF с использованием первого IMU
2: запускает одно ядро EKF, используя только второй IMU
3: запуск двух отдельных ядер EKF с использованием первого и второго IMU соответственно
EK3_PRIMARY: выбирает, какое «ядро» или «полоса» используется в качестве основного. Значение 0 выбирает первую дорожку IMU в EK3_IMU_MASK, 1 — вторую и т. д. Убедитесь, что выбранная первичная дорожка существует. См. «Сходство» и «Переключение между полосами» ниже.
Примечание
Самолет и ровер переключатся с EKF2 или EKF3 на DCM, если EKF выйдет из строя или EKF не объединяет данные GPS, несмотря на то, что GPS имеет блокировку 3D.
Нет возврата с EKF3 на EKF2 (или с EKF2 на EKF1)
Предупреждение
Используя приведенные выше параметры, можно одновременно запускать до 5 AHRS (DCMx1, EKF2x2, EKF3x2), но это может привести к проблемам с производительностью, поэтому при параллельном запуске EKF2 и EKF3 установите IMU_MASK уменьшить общее количество ядер.
Affinity and Lane Switching
EKF3 обеспечивает функцию привязки датчиков, которая позволяет ядрам EKF также использовать неосновные экземпляры датчиков, в частности, воздушной скорости, барометра, компаса (магнитометра) и GPS. Это позволяет транспортному средству лучше управлять датчиками хорошего качества и иметь возможность соответствующим образом переключаться между полосами движения, чтобы использовать наиболее эффективную полосу для оценки состояния. Дополнительные сведения и настройки см. в разделе EKF3 Affinity and Lane Switching.
Переходы GPS/не GPS
EKF3 (в ArduPilot 4.1 и выше) поддерживает переключение датчиков в полете, что может быть полезно для перехода между средами GPS и без GPS. Дополнительные сведения см. в разделе Переходы GPS / Non-GPS.
Дополнительные сведения см. в разделе Переходы GPS / Non-GPS.
Часто изменяемые параметры
EK2_ALT_SOURCE какой датчик использовать в качестве основного источника высоты
0 : использовать барометр (по умолчанию)
1 : использовать дальномер. Не используйте эту опцию, если транспортное средство не летит в помещении с ровной землей . Для следования по местности см. инструкции по следованию местности для коптера и самолета, которые не требуют изменения этого параметра.
2 : использовать GPS. Полезно, когда качество GPS очень хорошее и дрейф барометра может быть проблемой. Например, если транспортное средство будет выполнять миссии на большие расстояния с изменением высоты > 100 м.
EK2_ALT_M_NSE: по умолчанию «1.0». Меньшее число снижает зависимость от акселерометров, увеличивает зависимость от барометра.
EK2_GPS_TYPE:
Управляет использованием GPS.
0 : использовать 3D-скорость и 2D-позицию из GPS
1 : использовать 2D скорость и 2D положение (скорость GPS не влияет
к оценке высоты)2: использовать 2D-позицию
3 : GPS отсутствует (используется только оптический поток, если он доступен)
EK2_YAW_M_NSE: Управляет взвешиванием между GPS и компасом при расчете курса. Значение по умолчанию «0,5», более низкие значения приведут к большему доверию к компасу (т. е. к большему весу компаса)
Значение по умолчанию «0,5», более низкие значения приведут к большему доверию к компасу (т. е. к большему весу компаса)
Как упоминалось выше, более подробный обзор теории EKF и параметров настройки доступен на вики-странице разработчика в разделе Расширенный обзор навигации и настройки фильтра Калмана.
Узлы оценки состояния — robot_localization 2.4.8 документация
Стандартные параметры
~частота
Действительная частота в Гц, при которой фильтр производит оценку состояния.
Примечание
Фильтр не начнет вычисления, пока не получит хотя бы одно сообщение с одного из входов.
~sensor_timeout
Действительный период в секундах, после которого мы считаем, что время ожидания любого датчика истекло. В этом случае мы выполняем цикл прогнозирования на EKF без его корректировки. Этот параметр можно рассматривать как обратную минимальную частоту, при которой фильтр будет генерировать новых выходных данных.
~two_d_mode
Если ваш робот работает в плоской среде и вам удобно игнорировать незначительные изменения поверхности земли (о которых сообщает IMU), установите для этого параметра значение true. Он объединит нулевые значения для всех трехмерных переменных (Z, крена, тангажа и соответствующих им скоростей и ускорений). Это удерживает ковариации для этих значений от взрыва, гарантируя, что оценка состояния вашего робота останется прикрепленной к плоскости X-Y.
~[frame]
Конкретные параметры:
-
~map_frame -
~odom_frame -
~base_link_frame -
~base_link_output_frame -
~world_frame
Эти параметры определяют рабочий «режим» для robot_localization . REP-105 определяет три основных системы координат: map , odom и base_link . base_link — это система координат, прикрепленная к роботу. Положение робота в раме или будет меняться со временем, но в краткосрочной перспективе оно будет точным и должно быть постоянным. Фрейм map , как и фрейм odom , является мировым фиксированным фреймом координат, и хотя он содержит наиболее точную в глобальном масштабе оценку положения вашего робота, он подвержен дискретным скачкам, например, из-за слияния GPS данные. Вот как использовать эти параметры:
Положение робота в раме или будет меняться со временем, но в краткосрочной перспективе оно будет точным и должно быть постоянным. Фрейм map , как и фрейм odom , является мировым фиксированным фреймом координат, и хотя он содержит наиболее точную в глобальном масштабе оценку положения вашего робота, он подвержен дискретным скачкам, например, из-за слияния GPS данные. Вот как использовать эти параметры:
- Задайте для параметров
map_frame,odom_frameиbase_link_frameсоответствующие имена фреймов для вашей системы.
Примечание
Если в вашей системе нет
map_frame, просто удалите его и убедитесь, чтоworld_frameимеет значениеodom_frame.Примечание
Если вы используете несколько экземпляров EKF и хотели бы «переопределить» выходное преобразование и сообщение, чтобы этот кадр был его
child_frame_id, вы можете установить это.base_link_output_frameявляется необязательным и по умолчанию будетbase_link_frame. Это помогает включить отключенные деревья TF при запуске нескольких экземпляров EKF. Когда окончательное состояние вычислено, мы «переопределяем» выходное преобразование и сообщение, чтобы иметь этот кадр для егоchild_frame_id.

- Если вы объединяете только непрерывные данные о местоположении, такие как одометрия колесного энкодера, визуальная одометрия или данные IMU, установите
world_frameна ваше значениеodom_frame. Это поведение по умолчанию для узлов оценки состояния вrobot_localizationи наиболее распространенное его использование. - Если вы объединяете глобальные абсолютные данные о местоположении, которые подвержены дискретным скачкам (например, GPS или обновления положения по наблюдениям ориентиров), то:
- Установите для
world_frameзначениеmap_frame- Убедитесь, что что-то еще генерирует odom->base_link преобразование.
robot_localization. Однако этот экземпляр должен , а не объединять глобальные данные.
 Это может быть даже другой экземпляр узла оценки состояния
Это может быть даже другой экземпляр узла оценки состояния Значения по умолчанию для map_frame , odom_frame и base_link_frame : map , odom, и base_link, 90 118 соответственно. Параметр base_link_output_frame по умолчанию имеет значение 9.0130 base_link_frame . Параметр world_frame по умолчанию имеет значение odom_frame .
~transform_time_offset
Некоторые пакеты требуют, чтобы ваши преобразования были датированы будущим с небольшим смещением по времени. Значение этого параметра будет добавлено к отметке времени преобразования map->odom или odom->base_link , генерируемого узлами оценки состояния в robot_localization .
~transform_timeout
Пакет robot_localization использует метод tf2 s lookupTransform для запроса преобразований. Этот параметр указывает, как долго мы хотели бы ждать, если преобразование еще недоступно. По умолчанию 0, если не установлено. Значение 0 означает, что мы просто получаем последнее доступное (см. реализацию
Этот параметр указывает, как долго мы хотели бы ждать, если преобразование еще недоступно. По умолчанию 0, если не установлено. Значение 0 означает, что мы просто получаем последнее доступное (см. реализацию tf2 ) преобразование, поэтому мы не блокируем фильтр. Указание ненулевого transform_timeout влияет на синхронизацию фильтра, поскольку он ожидает максимум transform_timeout , чтобы преобразование стало доступным. Это напрямую означает, что в основном указанная желаемая скорость вывода не соблюдается, поскольку фильтру приходится ждать преобразований при обновлении.
~[датчик]
Для каждого датчика пользователям необходимо определить этот параметр на основе типа сообщения. Например, если мы определяем один источник сообщений Imu и два источника сообщений одометрии, конфигурация будет выглядеть так:
Индекс для каждого имени параметра начинается с 0 (например, odom0 , odom1 и т. д.) и должен определяться последовательно (например, вместо использовать
д.) и должен определяться последовательно (например, вместо использовать pose0 и pose2 90 131 если нет определено pose1 ). Значения для каждого параметра являются названием темы для этого датчика.
~[sensor]_config
Специальные параметры:
-
~odomN_config -
~twistN_config -
~imuN_config -
~poseN_config
Для каждого из сообщений датчика, определенных выше, пользователи должны указать, какие переменные этих сообщений должны быть объединены в окончательную оценку состояния. Пример конфигурации одометрии может выглядеть так:
[true, true, false, ложный, ложный, истинный, правда, ложь, ложь, ложный, ложный, истинный, ложь, ложь, ложь]
Порядок логических значений: \(X, Y, Z, roll, pitch, yaw, \dot{X}, \dot{Y}, \dot{Z}, \dot{roll}, \dot{ шаг}, \dot{yaw}, \ddot{X}, \ddot{Y}, \ddot{Z}\).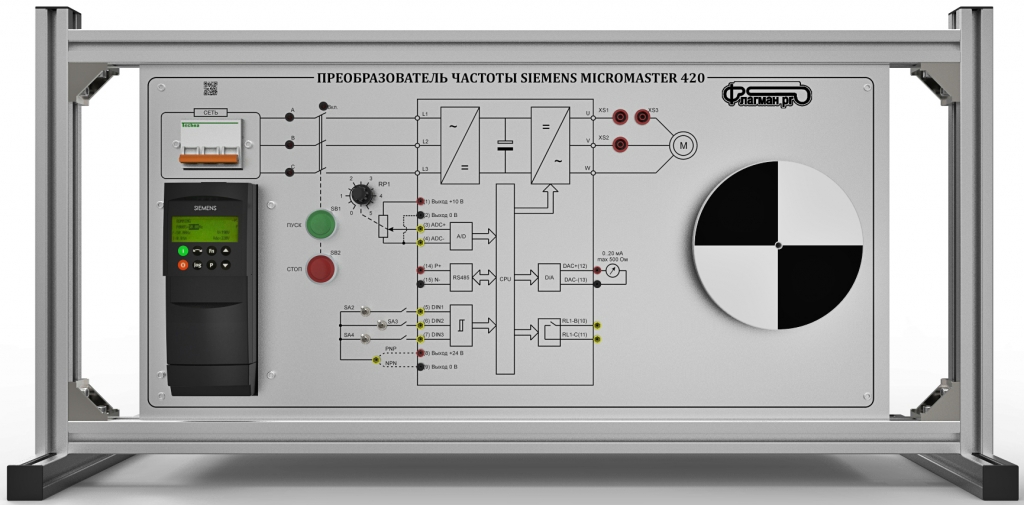 В этом примере мы объединяем положение \(X\) и \(Y\), \(рыскание\), \(\dot{X}\) и \(\dot{рыскание}\).
В этом примере мы объединяем положение \(X\) и \(Y\), \(рыскание\), \(\dot{X}\) и \(\dot{рыскание}\).
Примечание
Спецификация выполняется в frame_id датчика , не в world_frame или base_link_frame . См. руководство по настройке 9.0118 для получения дополнительной информации.
~[sensor]_queue_size
Конкретные параметры:
-
~odomN_queue_size -
~twistN_queue_size -
~imuN_queue_size -
~poseN_queue_size
Пользователи могут использовать эти параметры для настройки размеров очереди обратного вызова для каждого датчика. Это полезно, если значение параметра частота намного ниже, чем частота вашего датчика, поскольку это позволяет фильтру включать все измерения, полученные между циклами обновления.
~[датчик]_дифференциал
Специальные параметры:
-
~odomN_дифференциал -
~imuN_дифференциал -
~poseN_дифференциал
Для каждого из сообщений датчика, определенных выше , которые содержат информацию о позе , пользователи могут указать, следует ли дифференциально интегрировать переменные позы.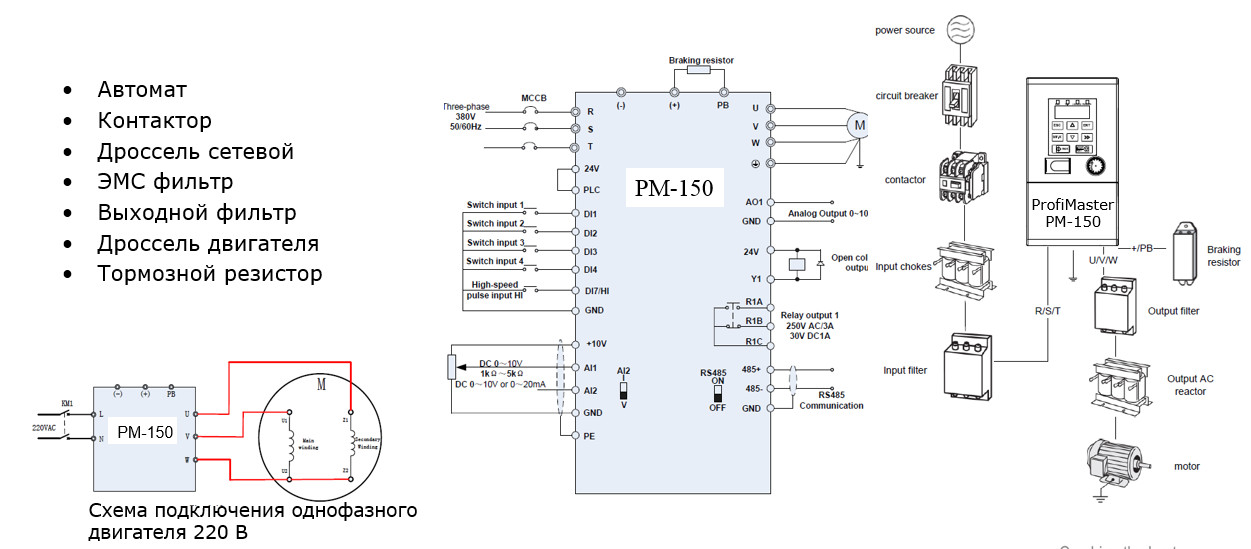 Если заданное значение установлено равным true , то для измерения во время \(t\) от рассматриваемого датчика мы сначала вычитаем измерение во время \(t-1\) и преобразуем полученное значение в скорость. Этот параметр особенно полезен, если у вашего робота есть два источника информации об абсолютном положении, например, измерения рыскания по одометру и IMU. В этом случае, если дисперсии на входных источниках настроены неправильно, эти измерения могут рассинхронизироваться друг с другом и вызвать колебания в фильтре, но дифференциальное интегрирование одного или обоих из них позволяет избежать этого сценария.
Если заданное значение установлено равным true , то для измерения во время \(t\) от рассматриваемого датчика мы сначала вычитаем измерение во время \(t-1\) и преобразуем полученное значение в скорость. Этот параметр особенно полезен, если у вашего робота есть два источника информации об абсолютном положении, например, измерения рыскания по одометру и IMU. В этом случае, если дисперсии на входных источниках настроены неправильно, эти измерения могут рассинхронизироваться друг с другом и вызвать колебания в фильтре, но дифференциальное интегрирование одного или обоих из них позволяет избежать этого сценария.
Пользователям следует соблюдать осторожность при использовании этого параметра для данных ориентации, поскольку преобразование в скорость означает, что ковариация для переменных состояния ориентации будет неограниченно возрастать (если только не будет объединен другой источник данных абсолютной ориентации). Если вы просто хотите, чтобы все ваши переменные позы начинались с \(0\), используйте параметр _relative .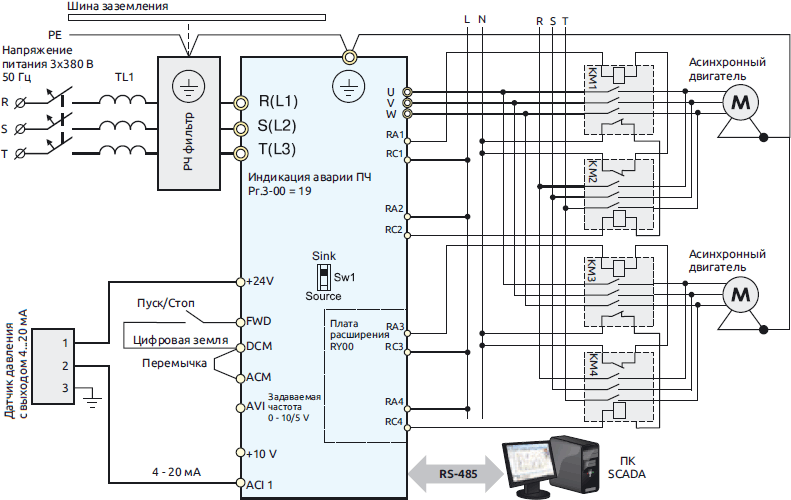
Примечание
Если вы объединяете информацию GPS через navsat_transform_node или utm_transform_node , вы должны убедиться, что параметр _дифференциал равен false.
~[датчик]_относительный
Специальные параметры:
-
~odomN_относительный -
~ imuN_относительный -
~poseN_relative
Если для этого параметра установлено значение true , то любые измерения от этого датчика будут объединены с первыми измерениями, полученными от этого датчика. Это полезно, если, например, вы хотите, чтобы ваша оценка состояния всегда начиналась с \((0, 0, 0)\) и со значениями \(крен, тангаж,\) и \(рыскание\) \((0 , 0, 0)\). Он похож на _дифференциал , но вместо удаления измерения в момент времени \(t-1\) мы всегда удаляем измерение в момент времени \(0\), и измерение не преобразуется в скорость.
~imuN_remove_gravitational_acceleration
При объединении данных акселерометра из IMU этот параметр определяет, будет ли ускорение, вызванное силой тяжести, удалено из измерения ускорения перед его объединением.
Примечание
Это предполагает, что IMU, предоставляющий данные об ускорении, также производит абсолютную ориентацию. Данные об ориентации необходимы для корректного удаления гравитационного ускорения. 92).
~publish_tf
Если true , узел оценки состояния опубликует преобразование из кадра, указанного параметром world_frame , в кадр, указанный параметром base_link_frame . По умолчанию true .
~publish_acceleration
Если true , узел оценки состояния опубликует состояние линейного ускорения. По умолчанию false .
~print_diagnostics
Если true, узел оценки состояния будет публиковать диагностические сообщения в разделе /diagnostics . Это полезно для отладки вашей конфигурации и данных датчиков.
Расширенные параметры
~use_control
Если true , узел оценки состояния будет прослушивать топик cmd_vel для сообщения геометрии_msgs/Twist и использовать его для создания условия ускорения.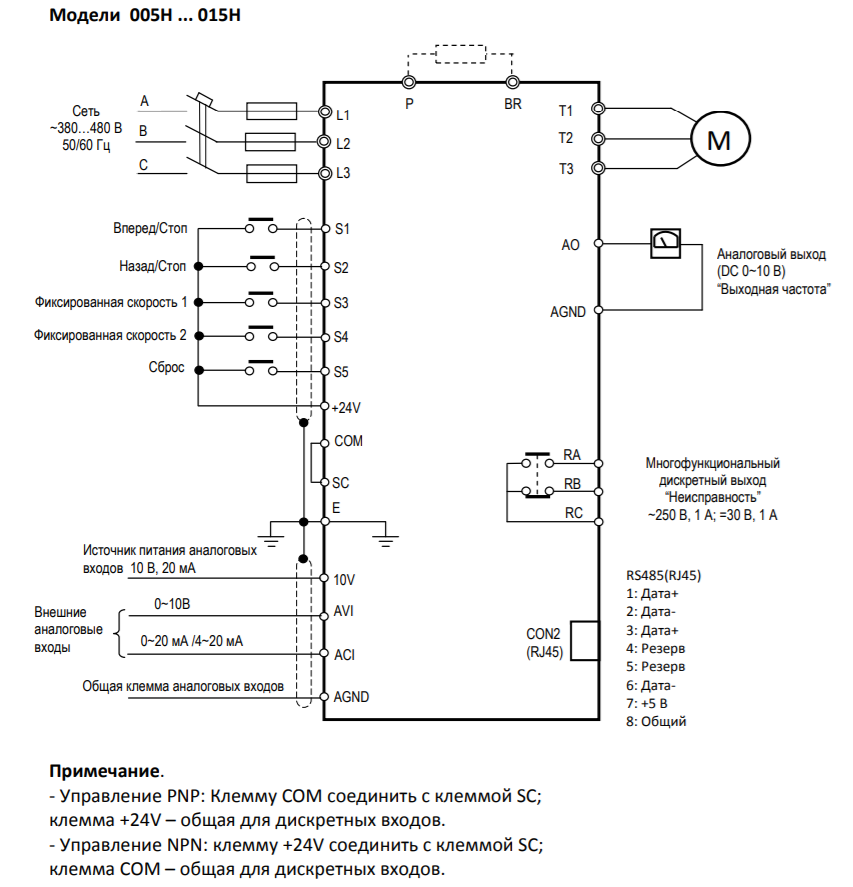 Затем этот термин используется в прогнозировании состояния робота. Это особенно полезно в ситуациях, когда даже небольшая задержка сходимости для данной переменной состояния вызывает проблемы в вашем приложении (например, смещение лидара во время вращения). По умолчанию ложь .
Затем этот термин используется в прогнозировании состояния робота. Это особенно полезно в ситуациях, когда даже небольшая задержка сходимости для данной переменной состояния вызывает проблемы в вашем приложении (например, смещение лидара во время вращения). По умолчанию ложь .
Примечание
Наличие и включение данных о линейном ускорении от IMU в настоящее время «отменяет» предсказанное значение линейного ускорения.
~control_timeout
Если для параметра use_control установлено значение true и в течение этого времени, указанного в секундах, не получена команда управления, то условие ускорения на основе управления перестает применяться.
~control_config
Управляет переменными в cmd_vel 9Сообщение 0131 используется для предсказания состояния. Порядок значений следующий: \(\dot{X}, \dot{Y}, \dot{Z}, \dot{roll}, \dot{pitch}, \dot{yaw}\). Используется, только если use_control имеет значение true .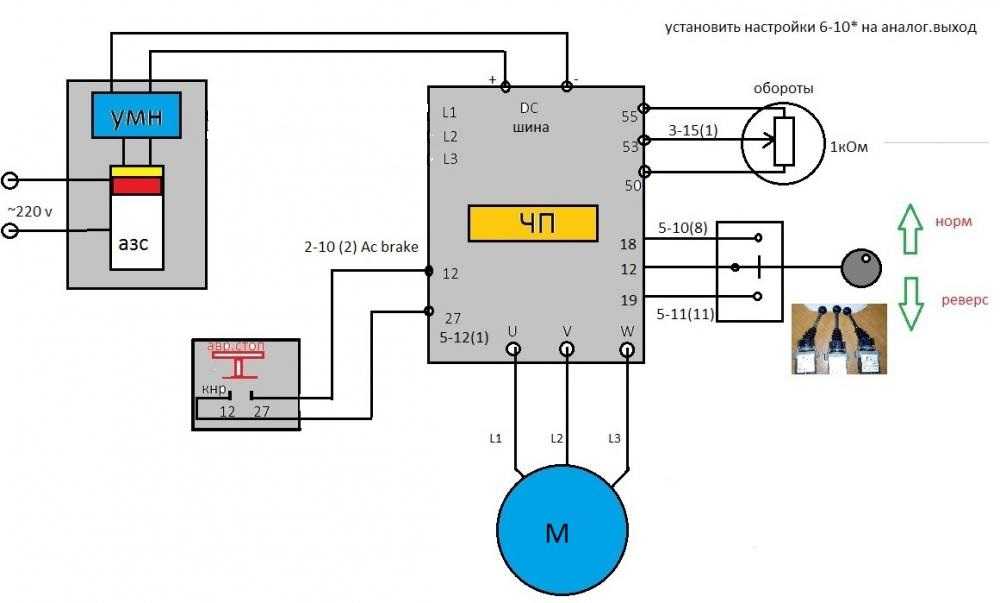
[true, false, false, ложь, ложь, истина]
~acceleration_limits
Насколько быстро ваш робот может ускоряться в каждом измерении. Соответствует порядку параметров в control_config . Используется, только если use_control имеет значение true .
[1.3, 0.0, 0.0, 0,0, 0,0, 3,2]
~deceleration_limits
Насколько быстро ваш робот может замедляться для каждого измерения. Соответствует порядку параметров в control_config . Используется, только если use_control имеет значение true .
~acceleration_gains
Если ваш робот не может мгновенно достичь предела ускорения, допустимое изменение можно контролировать с помощью этих коэффициентов усиления. Используется только если use_control имеет значение true .
[0,8, 0,0, 0,0, 0,0, 0,0, 0,9]
~deceleration_gains
Если ваш робот не может мгновенно достичь предела замедления, допустимое изменение можно контролировать с помощью этих коэффициентов усиления. Используется, только если use_control имеет значение true .
~smooth_lagged_data
Если какой-либо из ваших датчиков выдает данные с отметками времени, которые старше, чем самое последнее обновление фильтра (точнее, если у вас есть источник отложенных данных датчика), установите для этого параметра значение true позволит фильтру после приема запаздывающих данных вернуться в последнее состояние перед запаздывающим измерением, а затем обработать все измерения до текущего момента времени. Это особенно полезно для измерений, поступающих от узлов, которые требуют интенсивного использования ЦП для создания оценок позы (например, сопоставители лазерного сканирования), поскольку они часто отстают от текущего времени.
~history_length
Если для smooth_lagged_data установлено значение true , этот параметр определяет количество секунд, в течение которых фильтр будет сохранять свое состояние и историю измерений. Это значение должно быть не меньше временной разницы между запаздывающими измерениями и текущим временем.
~[sensor]_nodelay
Конкретные параметры:
-
~odomN_nodelay -
~twistN_nodelay -
~imuN_nodelay -
~poseN_nodelay
Если true , устанавливает транспортную подсказку tcpNoDelay . Есть некоторые свидетельства того, что алгоритм Нэгла мешает своевременному приему больших типов сообщений, таких как сообщение nav_msgs/Odometry. Установка этого значения на true для входа отключает алгоритм Нэгла для этого абонента. По умолчанию false .
~[sensor]_threshold
Специальные параметры:
-
~odomN_pose_rejection_threshold -
odomN_twist_rejection_threshold -
poseN_rejection_threshold -
TwistN_rejection_threshold -
imuN_pose_rejection_threshold -
imuN_angular_velocity_rejection_threshold -
imuN_linear_acceleration_rejection_threshold
Если ваши данные подвержены выбросам, используйте эти пороговые настройки, выраженные в виде расстояний Махаланобиса, чтобы контролировать, насколько далеко от текущего состояния транспортного средства могут быть измерения датчика. Каждое значение по умолчанию равно
Каждое значение по умолчанию равно numeric_limits, если не указано иное.
~debug
Логический флаг, указывающий, следует ли запускать программу в режиме отладки. ВНИМАНИЕ: установка значения true приведет к созданию большого объема данных. Данные записываются в значение параметр debug_out_file . По умолчанию false .
~debug_out_file
Если debug равно true , файл, в который записываются выходные данные отладки.
~process_noise_covariance
Ковариация шума процесса, обычно обозначаемая как Q , используется для моделирования неопределенности на этапе прогнозирования алгоритмов фильтрации. Его может быть сложно настроить, и он был представлен как параметр для упрощения настройки. Этот параметр можно оставить в покое, но вы добьетесь превосходных результатов, настроив его. В общем, чем больше значение для Q относительно дисперсии для данной переменной во входном сообщении, тем быстрее фильтр будет сходиться к значению в измерении.
~dynamic_process_noise_covariance
Если true , будет динамически масштабироваться process_noise_covariance на основе скорости робота. Это полезно, например, когда вы хотите, чтобы ковариация ошибки оценки вашего робота перестала расти, когда робот неподвижен. По умолчанию false .
~initial_estimate_covariance
Ковариация оценки, обычно обозначаемая как P , определяет ошибку в оценке текущего состояния. Параметр позволяет пользователям установить начальное значение для матрицы, которое повлияет на скорость сходимости фильтра. Например, если пользователи устанавливают значение в позиции \([0, 0]\) на очень маленькое значение, например, 1e-12 , а затем пытаются объединить измерения позиции X с высоким значением дисперсии для \( X\), то фильтр будет очень медленно «доверять» этим измерениям, и время сходимости увеличится. Опять же, пользователи должны быть осторожны с этим параметром. При объединении только данных о скорости (например, без информации об абсолютной позе) пользователи, скорее всего, будут , а не , хотят установить начальные значения ковариации для переменных абсолютной позы большими числами. Это связано с тем, что эти ошибки будут неограниченно расти (из-за отсутствия измерений абсолютной позы для уменьшения ошибки), и запуск их с больших значений не принесет пользы для оценки состояния.
Это связано с тем, что эти ошибки будут неограниченно расти (из-за отсутствия измерений абсолютной позы для уменьшения ошибки), и запуск их с больших значений не принесет пользы для оценки состояния.
~reset_on_time_jump
Если установлено значение true и ros::Time::isSimTime() равно true , фильтр сбрасывается в неинициализированное состояние при обнаружении перехода назад во времени в теме. Это полезно при работе с данными мешка, поскольку мешок можно перезапустить без перезапуска узла.
~predict_to_current_time
Если установлено значение true , фильтр прогнозирует и исправляет до времени последнего измерения (по умолчанию), но теперь также будет прогнозировать до текущего временного шага.
~disabled_at_startup
Если установлено значение true, не будет запускать фильтр при запуске.
Параметры, специфичные для узла
Стандартные и расширенные параметры являются общими для всех узлов оценки состояния в robot_localization .